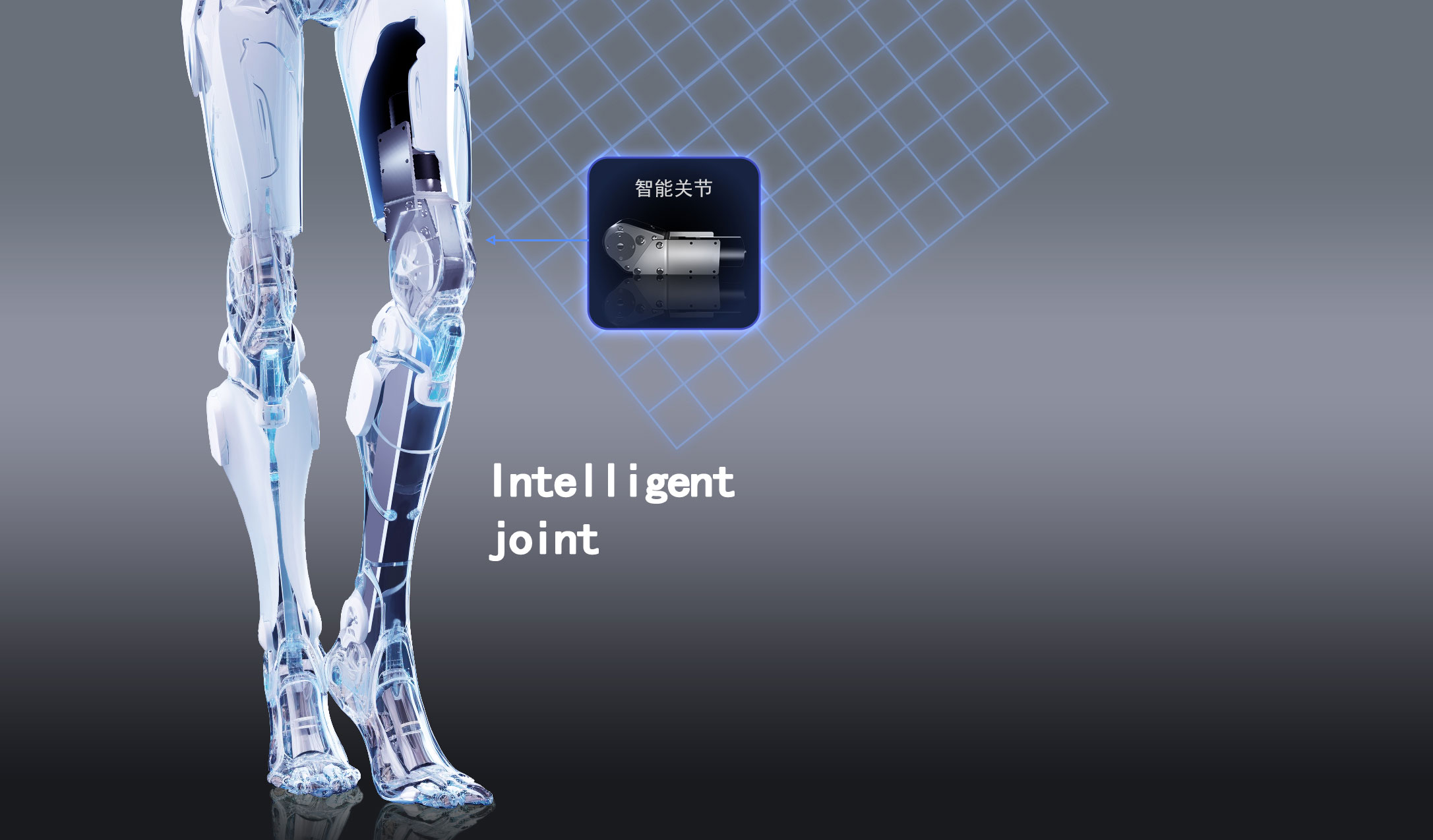
了解我们的智能关节
爱特生智能关节是一款针对人形服务机器人开发的关节运动单元。动力源为长寿命、高性能的直流无刷永磁电机机芯,由12V或24V直流供电,能够满足大多数人形服务机器人的动力要求。爱特生智能关节采用高性能双核MPU控制单元,控制精度高,稳定性强,对外提供的控制接口灵活简便、功能丰富,通过接口指令能够完成各类复杂的控制。爱特生智能关节开创性地提供了WiFi无线和串行总线二合一的通信控制方式,使安装集成变得异常简单,不需要大量布线,使机器人内部连接简洁美观。
智能关节的九大特点
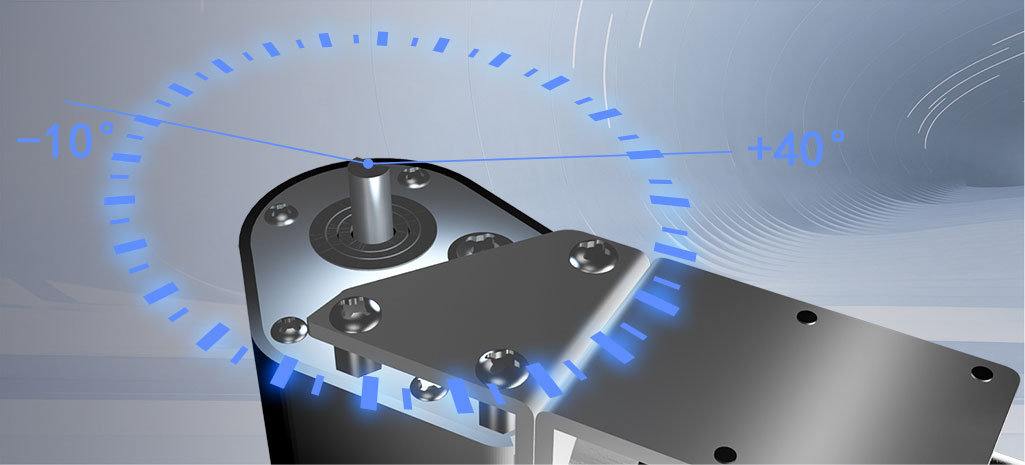
特点一:定位精度高
角度误差小于0.1度;支持回读当前角度。

特点二:速度精度高
转速均匀柔和,速度误差小于0.02秒。
特点三:驱动力强劲
采用直流无刷永磁机芯,免维护、使用寿命长(大于5000小时),最大转速90度/0.5秒,额定扭矩75Kg.cm,扭矩大小可按需定制。

特点四:功能丰富
可正反转;可按绝对位置旋转,也可按相对位置旋转;可设定动作转速;支持预设动作;支持多关节同步执行动作;可设定和保存原点位置。
特点五:安全可靠
不仅在运行中的可锁定位置,在断电后也可以位置自锁。
特点六:自动防烧机
自动检测堵转并做处理,避免外部因素烧坏电机。
特点七:安装灵活
结构紧凑、配套支架齐全,适合空间有限的机器人安装场景。

特点八: 布线少
当采用Wifi无线方式控制时,仅需电源线连接;当采用串行总线方式控制在连接任意多个关节时,也仅需两根电源线加两根通信线做串行连接即可。避免使用关节较多时,连接线多得一团乱麻的情况。

特点九:容易集成
丰富的二次开发接口,ASCII码指令控制,简单易懂。完善的开发教程、开源代码和丰富示例。

应用领域



